
There are two main types of Rotary Friction Welding:
Different parts and projects call for different forms of Rotary Friction Welding, and in this blog, we will highlight the advantages of each one to help you decide which one may be the best fit for your application.
DIRECT DRIVE FRICTION WELDING: HOW IT WORKS
Each Rotary technology we will discuss in this episode has something in common – they are all based off Direct Drive friction welding. That’s because Direct Drive is the foundation of Rotary friction welding.
It features:
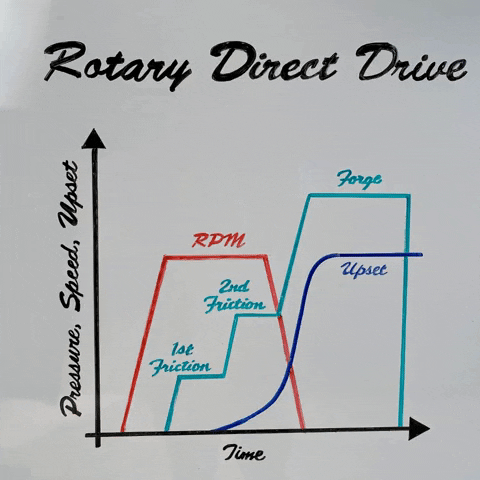
To begin the process, we rotate the part in the spindle up to a desired speed. With Direct Drive, we can go between two speeds – one associated with first friction and a different one for second friction.
First friction is at a low load and allows us to reduce the amount of torque at part contact when we are at a higher speed. It scrubs the components together to ensure the surface condition is conducive to reduce the coefficient of friction to start to build some heat.
Once that’s complete, we shift to a slightly higher load and switch to second friction, which is when we start to build up more heat in order to start upsetting material. We will stay in the second friction phase as long as necessary.
Direct Drive friction welding can be an attractive technology because we can customize the parameters to achieve our desired results.
For example, if we are welding a hardenable steel, we can apply some extra heat by using a longer second friction phase in order to help control the cooling rate.
In Direct Drive, we have a spindle limitation of the thrust bearing’s ability to react forge load when rotating, so typically we need to decrease our spindle speed to zero before we can bring on the forge load. At this point we increase to full forge load, squeeze out all of the softened material, and complete the weld.
Direct Drive friction welding, however, isn’t perfect for all applications… and that’s where our next technology comes in.
INERTIA FRICTION WELDING: BUILDING ON THE FOUNDATIONS
When Inertia friction welding was first invented, engineers studied some of the downsides to Direct Drive friction welding, primarily the torque peak at part contact.
To help overcome that issue, the inventors added a flywheel to the machine, which prevented high-torque applications from stalling the motors on friction welding machines.
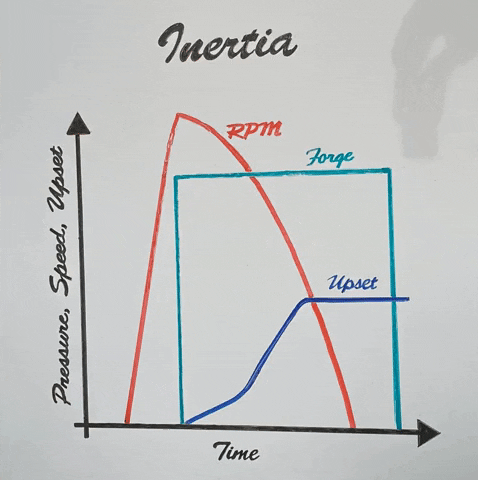
As you can see in the graph above, in Inertia friction welding, all energy is stored in the rotating flywheel.
During the Inertia process, we disengage the drive and we bring on forge load, thus dissipating the kinetic energy stored in the flywheels as heat.
In order to shorten the weld time and get a narrower Heat Affected Zones (HAZ), we bring on forge load from the beginning instead of going through a step approach like we do in Direct Drive friction welding.
To accomplish this, we need a hydrostatic spindle because the thrust bearings can’t handle the high speeds and high load.

Hongtai Building, 29, Xixian Street, Hi-Tech Zone , Dalian, Liaoning, China
Copyright © 2025 by Dalian Bluestar Trading Co.,LTD. Privacy Policy